 |
Главная |


Принцип действия и основные свойства механических гиротахометров. Оптические гиротахометры
|
из
5.00
|
Гиротахометром (ГТ) называется гироскопический прибор, предназначенный для измерения угловой скорости поворота объекта, на котором он установлен. Довольно часто по отношению к прибору указанного назначения применяют и такие термины, как «дифференцирующий гироскоп», «датчик угловой скорости».
В соответствии с рекомендацией Международной морской организации все суда дедвейтом более 100 тыс. т должны быть обязательно снабжены измерителем угловой скорости поворота. В настоящее время наибольшее распространение для целей судовождения получили гиротахометры, в которых используется "астатический гироскоп с двумя степенями свободы.
Модель гиротахометра, построенного на двухстепенном гироскопе с механическими элементами, обеспечивающими наложение на него восстанавливающего и демпфирирующего моментов, изображена на рис. 4.7. На этом рисунке показаны: гирокамера 3 с быстровращающимся ротором внутри нее; упругий элемент 1 (механическая пружина), создающий восстанавливающий момент по углу β ; демпфирующее устройство 2 (жидкостный или воздушных поршень), обеспечивающее погашение собственных колебаний гироскопа; преобразователь 4 механического движения (угла поворота гироскопа β) в электрический сигнал, выполненный в виде переменного потенциометра; индикатор измеряемой угловой скорости аналогового 5 ( вданном случае) или цифрового 6 типа (возможна и одновременная установка индикаторов обоих вариантов). При ориентации гироскопа, представленной на рис. 4.7, гиротахометр поставлен, на судно с целью измерения его угловой скорости по углу рыскания. Нетрудно себе представить, что при другой ориентации он может измерять угловую скорость бортовой или килевой качки. Принцип действия гиротахометра можно пояснить следующим образом. При появлении угловой скорости ωz (см. рис. 4.7) поворота объекта по углу рыскания возникает гироскопический момент. Вектор этого гироскопического момента направлен по оси OY и для малых углов β имеет значение Ry = Hωz. Указанный момент будет поворачивать гироскоп до тех пор, пока действие момента не будет уравновешено моментом сил упругости пружины Lп=Cβ, С — коэффициент, характеризующий жесткость пружины. В итоге угол поворота главной оси гироскопа будет пропорционалён угловой скорости поворота основания, так как из равенства Ry=Lп или Hωz = Cβr вытекает, что βr = (H/C)ωz. Следует особо отметить, что по принципу действия гиротахометр измеряет абсолютную угловую скорость здесь (а также в дальнейшем) не учитываются угловые скорости суточного вращения Земли и вращения объекта вокруг Земли лишь по той причине, что они либо находятся за порогом его чувствительности, либо входят в погрешность измерения ( если не компенсированы).
3.Графическая прокладка. Точность определения обстоятельств встречи и ЭДС.
Из точки О, принимаемой за место своего судна, прокладывают наблюдаемые пеленги П1 и П2 и по ним расстояния D1 и D2 (рис. 19.2). Через полученные точки А1 и А2 проводят ЛОД. Длина перпендикуляра ОС, опущенного из точки О на линию относительного движения, представляет собой в выбранном масштабе дистанцию кратчайшего сближения Dкр. Время сближения на кратчайшее расстояние: tкр=А2С/V0, Tкр=Т2+tкр
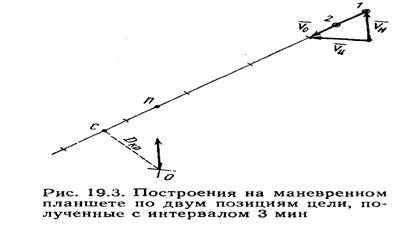
1. Независимо от интервала времени между наблюдениями век торный треугольник строят за промежуток времени б мин. В этом случае длина каждого вектора составляет 1/10 соответствующей скорости.
2. Экстраполированные позиции цели находят откладыванием по ЛОД расстояния между двумя известными ее позициями.
3. Сразу после получения первого положения цели в ее точку направляют вектор Vн в масштабе 1:10. После получения второго положения цели находят экстраполяцией ее положение через 6 мин после первого наблюдения (если Dt¹6 мин) и из начала вектора в эту точку проводят вектор Vц.
4. tкр рассчитывают, откладывая по ЛОД отрезки, равные V0 и деля глазомерно отрезок, включающий точку кратчайшего сближения.
Исследования показали, что при работе на шкалах среднего масштаба (15—16 миль) вследствие погрешности измерения пеленгов и дистанций относительное положение цели находится со среднеквадратической погрешностью М=0,6 кб. Если суммарную по грешность в двух относительных позициях цели ко второму моменту наблюдения, можно считать, что второе относительное положение определено с суммарной погрешностью МS=0,85 кб. Dtн
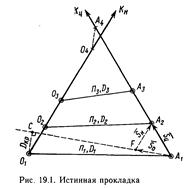 Истинная прокладка.
Истинная прокладка.
Такая прокладка может быть выполнена не посредственно на крупномасштабной путевой навигационной карте или листе бумаги. Сущность способа состоит в следующем. Обнаружив на экране индикатора эхо-сигнал другого судна, определяют его пеленг П1 и расстояние D1 пускают секундомер, замечают судовое время Т1, курс своего судна Кн и отсчет лага ОЛ1. По пеленгу и расстоянию на носят местоположение эхо-сигнала А1 относительно своего местоположения, предварительно выбран желаемый масштаб (рис. 19.1). Через определенный промежуток времени (для расчетов удобен интервал в 3 или 6 мин) наблюдения повторяют (П2, D2, Т2, ОЛ2 и наносят местоположения своего судна О2 и наблюдаемого судна А2. Проведя через точки А1 и А2 прямую линию, получим линию истинного перемещения цели Кц.
По расстоянию между точками А1 и А2 и по времени Т1 и Т2 можно определить скорость цели Vц и рассчитать, когда и на каком расстоянии она пересечет линию курса нашего судна Тпер и Dпер.
Для определения расстояния кратчайшего сближения и времени до него tкр из точки А2 откладывают в сторону, противоположную своему курсу, плавание судна за время между первым и вторым наблюдениями А2F=O1O2. Отрезок O1C, проведенный перпендикулярно к линии, проходящей через точки А1 и F, будет расстоянием кратчайшего сближения. Местоположение судов в момент кратчайшего сближения (точки O4 и A4) можно найти параллельным перемещением отрезка O1C в положение O4А4. Время сближения на кратчайшее рас стояние:

Билет 30.
 Определение места судна по трем светилам.Если число измеряемых навигационных параметров больше определяемых координат, то такие измерения называются избыточными. Избыточные измерения позволяют повысит точность обсервации и проконтролировать измерения на промахи. Т.к. измерения отягощены погрешностями, то высотные линии положения не пересекаются в одной точке, а образуют фигуру погрешностей. Метод весов заключается в том, что каждой вершине фигуры погрешностей приписывется вес, вычисляемый по формуле Pij = 10sin2ΔAij ΔAij - разность азимутов между i-ым и j-м светилами. Для нахождения вероятнейшего места веса последовательно складываем центрографическим методом, т.е. находим центр тяжести фигуры, состоящей из невесомых стержней, в вершинах которой приложены найденные веса. Место по весам всегда получается внутри треугольника и лежит ближе к короткой стороне и ближе к прямому углу.
Определение места судна по трем светилам.Если число измеряемых навигационных параметров больше определяемых координат, то такие измерения называются избыточными. Избыточные измерения позволяют повысит точность обсервации и проконтролировать измерения на промахи. Т.к. измерения отягощены погрешностями, то высотные линии положения не пересекаются в одной точке, а образуют фигуру погрешностей. Метод весов заключается в том, что каждой вершине фигуры погрешностей приписывется вес, вычисляемый по формуле Pij = 10sin2ΔAij ΔAij - разность азимутов между i-ым и j-м светилами. Для нахождения вероятнейшего места веса последовательно складываем центрографическим методом, т.е. находим центр тяжести фигуры, состоящей из невесомых стержней, в вершинах которой приложены найденные веса. Место по весам всегда получается внутри треугольника и лежит ближе к короткой стороне и ближе к прямому углу.
Два варианта ОМС по трем светилам. Пусть светила расположены равномерно по всему горизонту с разностью азимутов ΔА = 120°. Фигура погрешностей будет собой представлять равносторонний треугольник. Веса вершин будут равны 7. ОМС по весам будет в центре треугольника на пересечении биссектрис. Астрономические биссектрисы также пересекаются внутри треугольника.
Вывод: ОМС по весам совпадает с ОМС по астрономическим биссектрисам, следовательно, это самый идеальный вариант ОМС по 3-м светилам. Если светила располагаются ассиметрично, но по всему горизонту, то точки по весам и по астрономическим биссектрисам будут располагаться внутри треугольника вблизи друг от друга.
 Оценка точности ОМС по избыточным ВЛП.Оценку точности по избыточным ВЛП можно получить, применив метод наименьших квадратов. При равномерном распределении светил по всему горизонту рекомендуется удобная для запоминания формула, по которой вычисляется радиальная погрешность: k = 1 при симметричном расположении светил; k = 1,25 при отклонениях от симметричности; N - число линий положения. В среднем для трех ВЛП можно принимать M = 1,3mh, а для четырех ВЛП - M = 1,1mh. Достоинства и недостатки ОМС по 3-м светилам. Если учитывать только случайные погрешности, то ОМС по 3-м ВЛП гораздо точнее (приблизительно на 20%), чем по двум светилам. Кроме того при ОМС по трем светилам исключаются систематические погрешности.Объём вычислений при ОМС по 3-м ВЛП на 50% больше объёма вычислений при ОМС по 2-м ВЛП.
Оценка точности ОМС по избыточным ВЛП.Оценку точности по избыточным ВЛП можно получить, применив метод наименьших квадратов. При равномерном распределении светил по всему горизонту рекомендуется удобная для запоминания формула, по которой вычисляется радиальная погрешность: k = 1 при симметричном расположении светил; k = 1,25 при отклонениях от симметричности; N - число линий положения. В среднем для трех ВЛП можно принимать M = 1,3mh, а для четырех ВЛП - M = 1,1mh. Достоинства и недостатки ОМС по 3-м светилам. Если учитывать только случайные погрешности, то ОМС по 3-м ВЛП гораздо точнее (приблизительно на 20%), чем по двум светилам. Кроме того при ОМС по трем светилам исключаются систематические погрешности.Объём вычислений при ОМС по 3-м ВЛП на 50% больше объёма вычислений при ОМС по 2-м ВЛП.
2.Судовые автоматические идентификационные системы.
 Универсальная автоматическая идентификационная система (УАИС) предназначена для повышения безопасности плавания судов в открытом море и прибрежных водах путем автоматического обмена между судами и береговыми станциями СУДС навигационной, статической и рейсовой информацией, а также информацией касающейся безопасности плавания.
Универсальная автоматическая идентификационная система (УАИС) предназначена для повышения безопасности плавания судов в открытом море и прибрежных водах путем автоматического обмена между судами и береговыми станциями СУДС навигационной, статической и рейсовой информацией, а также информацией касающейся безопасности плавания.
В соответствии с требованиями главы v “Безопасность мореплавания” Международной конвенции SOLAS все суда водоизмещением 300 тонн и более должны быть оборудованы аппаратурой УАИС.
Помимо основных функций (передача навигационных, статических и маршрутных данных) станция УАИС может использоваться для распространения и приема по каналам УАИС дифференциальных поправок GNSS, обслуживания запросов дальней связи. Конструктивно станция АИС состоит из двух блоков:
– основной блок (БО) с двумя антеннами (антенна VHF и антенна GNSS). Основной блок имеет международное название – TRANSPONDER;
– пульт управления и отображения (ПУО).
Районы плавания судов, где осуществляется контроль за безопасностью судоходства с помощью АИС на текущем этапе работы системы подразделяются на три зоны:
- открытое море (морской район А3 Глобальной морской системы связи при бедствии и для обеспечения безопасности – ГМССБ);
- зона прибрежного плавания (морской район А2 ГМССБ);
- подходы к портам до границ, от которых начинаются зоны действия СУДС (морской район А1 ГМССБ).
Одновременно каждым судном, оборудованным АИС, принимается аналогичная информация от других судов, находящихся в радиусе действия, ограниченном распространением радиоволн ОВЧ (УКВ) диапазона (20 – 30 миль). Принятая информация автоматически обрабатывается и отображается на одном из судовых навигационных дисплеев. Синхронизация работы всех станций АИС (судовых и береговых) обеспечивается глобальной навигационной спутниковой системой (ГНСС), которая также является источником передаваемой информации о координатах и векторе скорости.
В прибрежных районах, где установлены базовые станции АИС, информация, передаваемая судами, принимается базовыми станциями и поступает в распоряжение береговых служб (СУДС и системы судовых сообщений, службы поиска и спасения, службы экологического контроля и ликвидации последствий загрязнения, пограничные и таможенные власти, различные портовые службы). Обычно, для получения целостной картины судоходства в контролируемом районе, базовые станции АИС объединяются в сети, позволяющие интегрировать информацию от отдельных базовых станций между собой, а также с информацией, получаемой в СУДС и в обязательных системах судовых сообщений. В прибрежных районах точность определения координат судов с помощью ГНСС и, следовательно, эффективность АИС могут быть повышены посредством береговых опорных станций и радиомаяков, передающих для судов дифференциальные поправки.
|
из
5.00
|
Обсуждение в статье: Принцип действия и основные свойства механических гиротахометров. Оптические гиротахометры |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы