 |
Главная |


Разработка структурной схемы САР
|
из
5.00
|
3.1. Разработка структурной схемы ПР
Объект управления является не линейным звеном. Так как содержит два умножения, кроме того каждая из переменных имеет ещё степенную зависимость, но ТАУ может работать только с линейными системами. Поэтому функциональную схему следуют линеаризовать.
Рисунок 4. Структурная схема ПР не линеаризованная.
ФП - функциональный преобразователь имеет два умножения, кроме того каждая из переменных имеет ещё степенную зависимость.
Заданные значения V, S, t являются рабочими точками системы, т.е. при этих значениях необходимо линеаризовать имеющуюся функциональную схему. При линеаризации находится коэффициент передачи функционального преобразователя в рабочей точке.
Находим для каждого функционального преобразователя коэффициент передачи в рабочей точке.
Для 1ФП
Рисунок 5. График для определения коэффициента передачи для 1ФП.
По графику определили:
 мм/зуб (3.1)
мм/зуб (3.1)
 мм/зуб (3.2)
мм/зуб (3.2)
Коэффициент передачи
 (3.3)
(3.3)
Для 2ФП
Рисунок 6. График для определения коэффициента передачи для 2ФП.
По графику определили:
 м/мин (3.4)
м/мин (3.4)
 м/мин (3.5)
м/мин (3.5)
Коэффициент передачи
 (3.6)
(3.6)
Для 3ФП коэффициент передачи будет равен 1, так как по исходным данным глубина резания имеет линейную зависимость.
Линеаризованная структурная схема процесса резания:
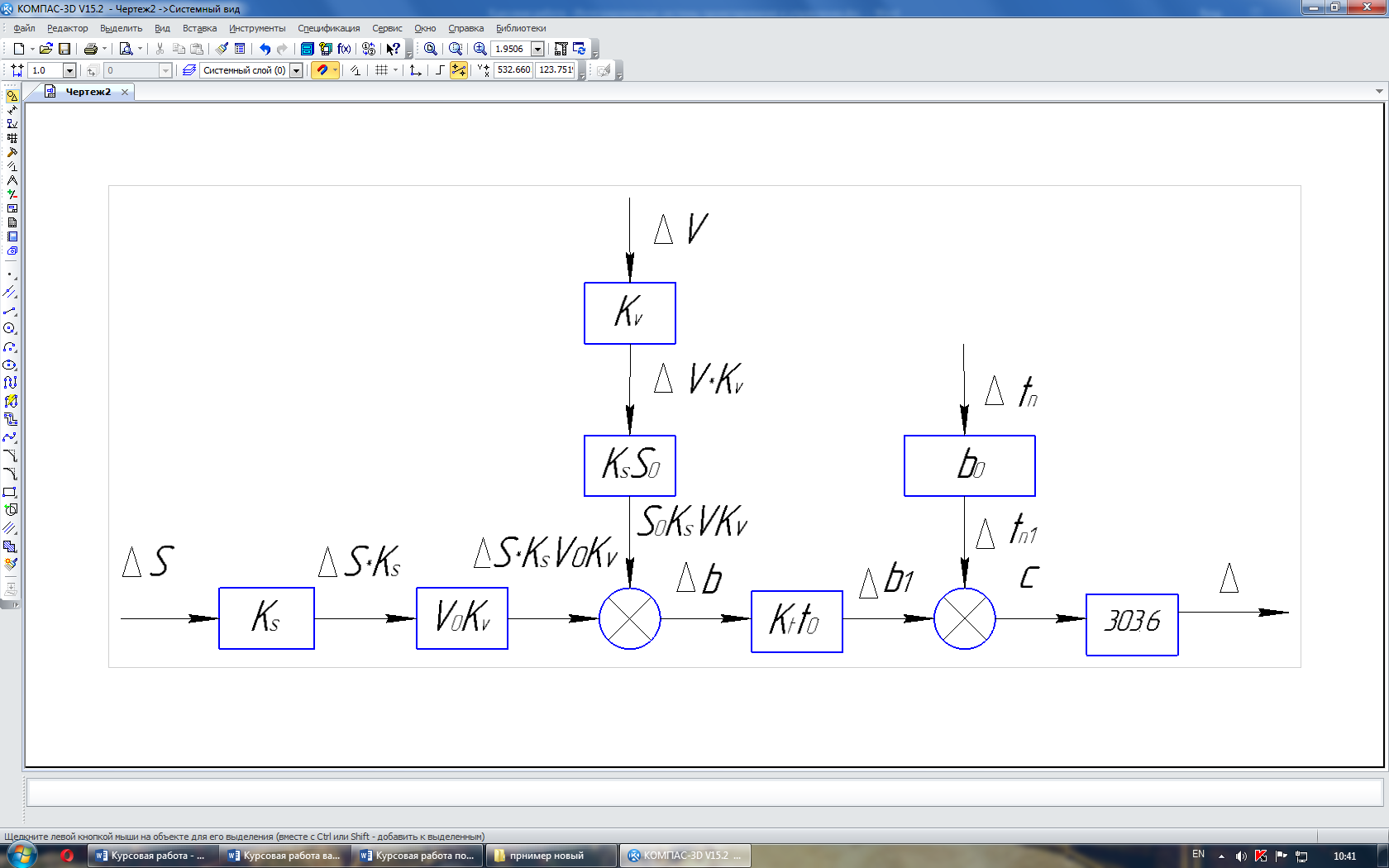
Где  VS0Ks+
VS0Ks+  SV0Kv=
SV0Kv=  b
b
b0=V0KvS0Ks (3.7)
c=  b Ktt0+ tп b0 (3.8)
b Ktt0+ tп b0 (3.8)
Рисунок 7 – Линеаризованная схема процесса резания как объекта управления.
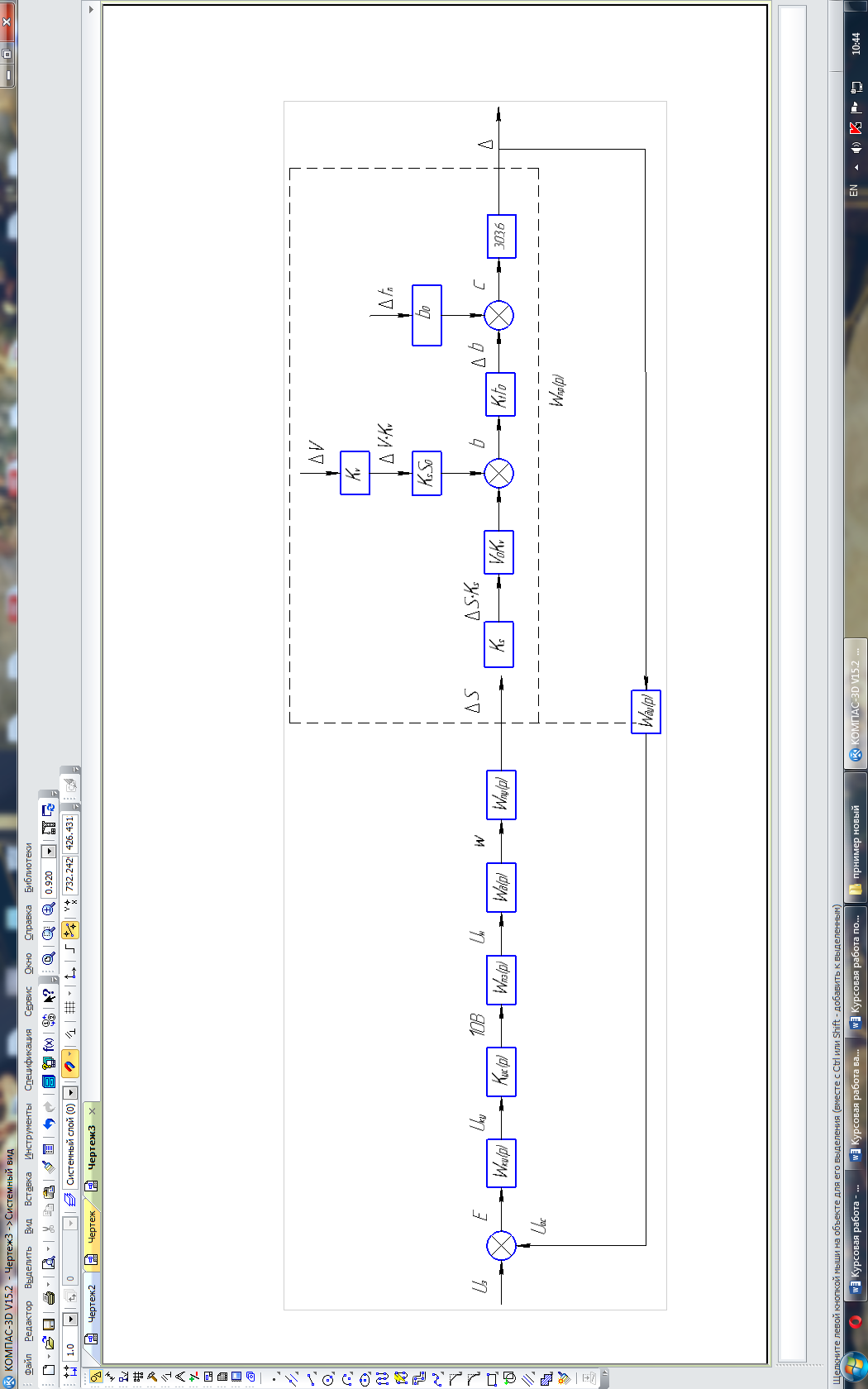
3.2 Разработка структурной схемы САР
Найдём передаточные функции для элементов схемы.
1. Корректирующее устройство.
Для некорректированной системы: WКУ(p) = 1.
2. Преобразователь энергии, с точки зрения динамики процесса является апериодическим звеном второго порядка. Его передаточная функция:
 , где значение постоянных времени T1 и T2 дано в исходных данных, а значение коэффициента передачи найдем из условия номинального значения напряжения якоря двигателя.
, где значение постоянных времени T1 и T2 дано в исходных данных, а значение коэффициента передачи найдем из условия номинального значения напряжения якоря двигателя.
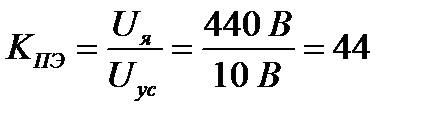 (3.9)
(3.9)
 (3.10)
(3.10)
3. Двигатель.
Двигатель можно представить в виде следующей схемы:
|
| U(p) |
| U(p)-E(p) |
| CMФ |
| I(p) |
| MC |
| M(p) |

|
| М(p)- MC |

|
| CeФ |
| E(p) |
Рисунок 8. Структурная схема двигателя
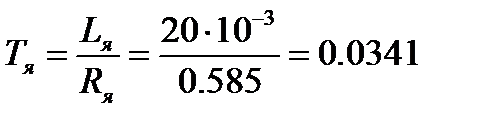
Определим параметры двигателя:
 (3.11)
(3.11)
 (3.12)
(3.12)
 (Н
(Н  м/А ) (3.13)
м/А ) (3.13)
 Н·м (3.14)
Н·м (3.14)
 Н·м/А (3.15)
Н·м/А (3.15)
 А (3.16)
А (3.16)
 (3.17)
(3.17)
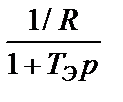
Передаточная функция двигателя имеет вид:
 (3.18)
(3.18)
4. Передаточное устройство является линейным звеном. Зная номинальные значения частоты вращения вала двигателя и подачи на зуб фрезерного станка, запишем передаточную функцию
 (3.19)
(3.19)
5. Определение передаточной функции ПР.
Передаточная функция ПР имеет вид:
 (3.20)
(3.20)
6. Определение передаточной функции датчика обратной связи.
 (3.21)
(3.21)
где Тду = 0 постоянная времени ДУ;
kду – коэффициент передачи ДУ;
 В/мкм (3.22)
В/мкм (3.22)
7. Определение коэффициента усиления разомкнутой системы.
 (3.23)
(3.23)
где  (3.24)
(3.24)
 мкм (3.25)
мкм (3.25)
Тогда  мкм (3.26)
мкм (3.26)
Отсюда получаем  (3.27)
(3.27)
Рисунок 9. Структурная схема САР
|
из
5.00
|
Обсуждение в статье: Разработка структурной схемы САР |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы