 |
Главная |


Самолётная система координат
|
из
5.00
|
Третья координатная система OXYZ, используемая при математическом описании движения самолёта, полностью связана с его корпусом, перемещается и вращается вместе с ним. Поэтому такая система получила название подвижной или связанной системы координат. Начало 0 связанной системы осей координат помещено в центр масс (ц.м.) самолета, ось 0X направлена от хвостовой к носовой части самолета, ось 0Y перпендикулярна оси 0X и направлена вверх в плоскости симметрии, ось 0Z перпендикулярна плоскости симметрии самолета и направлена в сторону правой консоли крыла.

Рис.2.1 Связанная система координат самолёта
Ориентация связанной системы координат относительно полусвязанной неподвижной системы координат определяется тремя углами Эйлера: угол рысканья ψ; угол тангажа θ; угол крена γ.
Углом рыскания ψ называется угол между осью OXg и проекцией оси OX связанной системы координат на горизонтальную плоскость OXgZg.
Углом тангажа θ называется угол между горизонтальной плоскостью OXgZg и продольной осью OX самолёта.
Углом крена γ называется угол между вертикальной плоскостью OXgYg и диаметральной плоскостью самолёта OXY.

Рис.2.2 Углы рыскания, тангажа и крена самолёта
1.2.4 Взаимосвязь различных систем
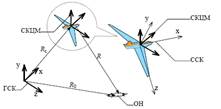
Рис.2.3 Схема, поясняющая взаимодействие трех систем координат: географической, центра масс самолета и самолетной
Заданную угловую ориентацию самолёта относительно осей полусвязанной неподвижной системы координат можно получить, выполнив три последовательных поворота, которые следует проводить в предположении, что в начальный момент углового движения самолёта координатные оси OXgYgZg и OXYZ совпадают.
Первый поворот на угол ψ осуществим относительно оси OYg (в начальный момент времени с ней совпадает ось OY). При этом оси OX и OZ, оставаясь в плоскости OXgZg, займут некоторое промежуточное положение OX' и OZ'.
Пусть  - направляющие орты полусвязанной неподвижной системы координат OXgYgZg;
- направляющие орты полусвязанной неподвижной системы координат OXgYgZg;  - направляющие орты промежуточной системы координат OX'YgZ'.
- направляющие орты промежуточной системы координат OX'YgZ'.
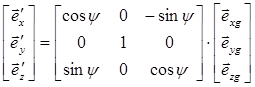
Направляющие орты  связаны с ортами следующими соотношениями:
связаны с ортами следующими соотношениями:
 (1)
(1)
Это координатное преобразование задается с помощью так называемой матрицы направляющих косинусов, которая в данном случае имеет вид
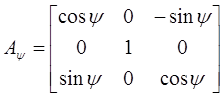 (2)
(2)
Другая (векторно-матричная) форма записи системы равенств(1)
 . .
. .
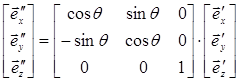
Второй поворот осей координат произведем относительно оси OZ' на угол θ. В результате чего координатные оси OX' и OYg займут положение OX'' и OY''. Направляющие орты  второй промежуточной системы координат OX''Y''Z' связаны с ортами
второй промежуточной системы координат OX''Y''Z' связаны с ортами  следующими равенствами
следующими равенствами
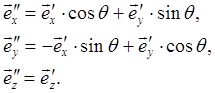 (3)
(3)
Здесь матрица направляющих косинусов имеет вид
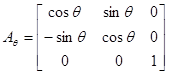 (4)
(4)
и тогда уравнения (3) можно переписать в векторно - матричной форме
Третий поворот координатных осей осуществим относительно оси OX'' на угол γ. При этом ось OY'' займет положение OY, а ось OZ' - OZ, ось OX'' совпадет с осью OX. Орты  связанной системы координат определяются через орты промежуточной системы координат OX''Y''Z' с помощью равенств
связанной системы координат определяются через орты промежуточной системы координат OX''Y''Z' с помощью равенств
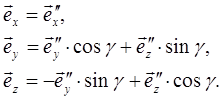 (5)
(5)
Матрица направляющих косинусов третьего поворота координатной системы в соответствии с (5) будет
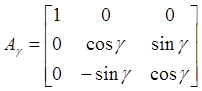 (6)
(6)
а уравнения (5) в векторно - матричной форме записи перепишутся следующим образом
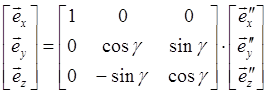 .
.
С учетом полученных выше равенств последовательно получаем,


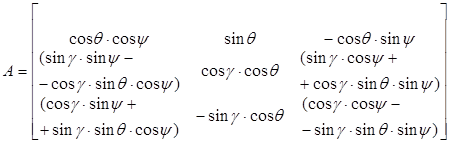
где  - это матрица преобразований векторных величин, заданных в полусвязанной неподвижной системе координат OXgYgZg, в векторные величины в связанной системе координат OXYZ. Непосредственное вычисление матрицы A дает следующий результат
- это матрица преобразований векторных величин, заданных в полусвязанной неподвижной системе координат OXgYgZg, в векторные величины в связанной системе координат OXYZ. Непосредственное вычисление матрицы A дает следующий результат
Здесь следует отметить, что матрица A является ортогональной, т. е.  .
.
Математическая модель
|
из
5.00
|
Обсуждение в статье: Самолётная система координат |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы