 |
Главная |


Определение передаточной функции замкнутой системы регулирования
|
из
5.00
|
Любую систему автоматического регулирования можно представить в виде совокупности различных звеньев, соединенных между собой тем или иным образом. На рисунке 6 представлена схема последовательного соединения звеньев
 |
Рисунок 6 – Структурная схема последовательного соединения звеньев
На рисунке 7 приведена схема параллельного соединения звеньев
 | |||
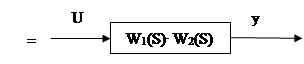 | |||
Рисунок 7 – Структурная схема параллельного соединения звеньев
|
 | |||||
 | |||||
| |||||
Рисунок 8 – Структурная схема обратной связи
Используя правило структурных преобразований, найдем передаточную функцию замкнутой системы регулирования, представленной на рисунке 3.
Передаточная функция пропорционального звена имеет вид
WР = КП,
где КП – коэффициент передачи регулятора.
Передаточная функция колебательного звена имеет вид


Передаточная функция обратной связи W2 = 1
Тогда передаточная функция замкнутой системы будет иметь вид

После подстановки численных значений получим


Определение качества регулирования
Качество переходного процесса количественно оценивается следующими показателями
1 Статическая ошибка регулирования есть рассогласование между установившемся значением регулируемой величины после переходного процесса и ее заданным значением
δст абс = (yЗ – yУСТ) . 100%

где yЗ – величина ступенчатого изменения задания,
yУСТ – установившееся значение регулируемой переменной
2 Динамическая ошибка регулирования есть максимальное отклонение регулируемой переменной в переходном процессе от ее заданного значения
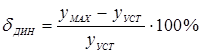
где yMAX – максимальное значение регулируемой переменной после ступенчатого изменения задания.
3 Время регулирования есть отрезок, в течении которого регулируемая величина достигает нового установившегося значения с некоторой, заранее установленной точностью, ±Δ.
Вычислим и построим переходную функцию замкнутой системы регулирования с П-регулятором и графически определим показатели качества.
Переходная функция для системы с передаточной функцией вида


Вычисляется по формуле

где α = 0,5 . (b1 / b2)


Следует учесть, что φ0, βt + φ0 – углы в радианах.
Формулы применимы, если выполняется равенство


0 ≤ 0,61<1 → неравенство выполняется
α = 0,5 . (6,12 / 25,37) = 0,12
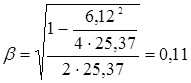

Тогда

Вычислим значение h(t) в зависимости от времени (таблица 4).
Таблица 4 – Расчет значений h(t) в зависимости от времени
| t, мин | h(t) |
| 0 | 0 |
| 5 | 0,10 |
| 10 | 0,31 |
| 15 | 0,44 |
| 20 | 0,49 |
| 25 | 0,53 |
| 30 | 0,528 |
| 35 | 0,52 |
| 40 | 0,50 |
| 45 | 0,51 |
| 50 | 0,51 |
Переходная функция изображена на рисунке 9.
Статическая ошибка равна

Динамическая ошибка равна

Время регулирования tР = 16,5 мин
|
из
5.00
|
Обсуждение в статье: Определение передаточной функции замкнутой системы регулирования |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы