 |
Главная |


АСТАТИЧЕСКИЙ РЕГУЛЯТОР СКОРОСТИ
|
из
5.00
|
Рассмотрим характеристики САР скорости с ПИ- регулятором. Структурная схема аналогична рассмотренной ранее для статического регулятора скорости, передаточная функция регулятора:
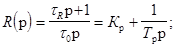
Передаточные функции разомкнутых и замкнутых систем по управляющему воздействию.


где Кv=КпКдКс/tо - коэффициент усиления разомкнутой системы по w.
Из структурной схемы и передаточной функции следует, что регулятор скорости является астатической системой с астатизмом первого порядка, как по управляющему, так и по возмущающему Iс воздействиям. Следовательно: статические ошибки DwI и DUe равны нулю, однако устойчивость системы ухудшается, т.к. интегратор вносит фазовый сдвиг в замкнутый контур- 90о на всех частотах. Это так же следует из выражения для предельного коэффициента системы.
Кvпр = 1/(Тэ- tR);
т.е. Кvпр имеет предельное значение. Оптимальное значение постоянной времени регулятора с точки зрения устойчивости tRотп = Тэ. В этом случае Кvпр = ¥.
Регулятор скорости с отрицательной обратной связь по току.
На рис представлена структурная схема САР с обратной связь по току.
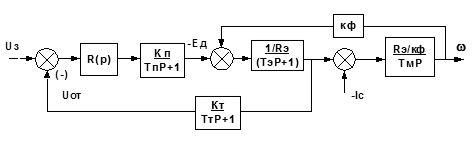
Кт/(Тт+1)- датчики тока$;
Кт- коэффициент передачи ОС по току;
Тт- постоянная времени фильтра/
Преобразуем структурную схему на рис к виду рис
Учитывая, что в статическом режиме р=0, Iд = Iс
 ,
,
(+)- при положительной обратной связи по току.
(-)- при отрицательной обратной связи по току.
Скорость идеального холостого хода в замкнутой и разомкнутой системах одинакова.
 ,
,
где Dwр = IсRэКд- падение скорости в разомкнутой системе.
При Кт=0, Dwзт=Dwpт
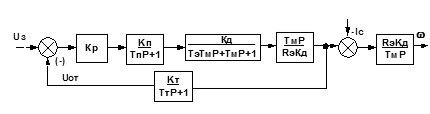
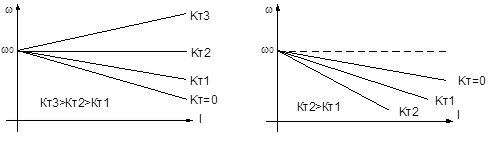
На рис приведены статические характеристики w=f(I) для положительной а) ,
и для отрицательной б) ОС при Uз= const
Кт=0соответствует характеристике разомкнутой системы
При положительной обратной связи по току возможны три режима работы ЭП :
- режим недокомпенсации,
когда 
В этом случае с ростом нагрузки скорость w уменьшается.
режим полной компенсации:
 и Dw3 = 0,
и Dw3 = 0,
т.е. с изменением нагрузки w = const,
режим перекомпенсации:
с ростом нагрузки скорость возрастает. Указанные режимы могут иметь место при Кт = const и при изменении Кр
При отрицательной обратной связи по току  всегда, падение скорости под нагрузкой больше, чем в разомкнутой системе. Поэтому отрицательная обратная связь по току в регуляторах скорости применяется только в сочетании с отрицательной обратной связью по скорости.
всегда, падение скорости под нагрузкой больше, чем в разомкнутой системе. Поэтому отрицательная обратная связь по току в регуляторах скорости применяется только в сочетании с отрицательной обратной связью по скорости.
Передаточные функции по задающему воздействию разомкнутой W(p) и замкнутой Ф(p) систем:
 -для разомкнутой системы;
-для разомкнутой системы;
 - для замкнутой системы;
- для замкнутой системы;
т.е. W03=WОР
Здесь «-» cоответствует положительной обратной связи по току;
«+» cоответствует отрицательной обратной связи по току;
При положительной обратной связи по току в режиме недокомпенсации система устойчива;
- в режиме перекомпенсации система не устойчива;
- в режиме компенсации система находится на границе устойчивости.
При отрицательной обратной связи система всегда устойчива.
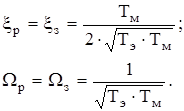
Характер переходного процесса в системе зависит от коэффициента x3 и W03. Так как Wор = W03, скорость затухания переходного процесса в замкнутой и разомкнутой системах одинакова. Если принять xр = 1, тогда в режиме:
- недокомпенсации  x3<1; переходной процесс затухающий;
x3<1; переходной процесс затухающий;
- компенсации  x3=0;- гармонические незатухающие колебания;
x3=0;- гармонические незатухающие колебания;
- перекомпенсации  x3<0; переходной процесс расходящийся.
x3<0; переходной процесс расходящийся.
В системе с отрицательной обратной связью по току x3>1; переходной процесс апериодический.
Хотя в режиме недокомпенсации система устойчивости, регулятор скорости в таком режиме самостоятельно практического применения не получил; он широко используется совместно с отрицательной обратной связи по скорости в системах с повышенными требованиями к жесткости статической характеристики.
Регулятор скорости с отрицательной обратной свзью по напряжению
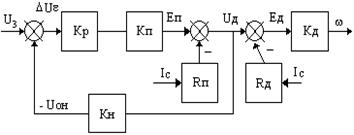
Для установившегося режима составим структурную схему (Рис. 10-14.).
В данном случае имеем систему стабилизации напряжения, подводимого к якорю ДПТ. Полагая выходным сигналом напряжение Uд, находим:
 ,
,
где Uдо - напряжение на входе ДПТ при Iс = 0
 - падение напряжения в ТП в замкнутой системе при Iс > 0.
- падение напряжения в ТП в замкнутой системе при Iс > 0.
DUдр- падение напряжения в ТП в разомкнутой системе;
Rп- внутреннее сопротивление ТП;
Кн- коэффициент обратной связи по напряжению.
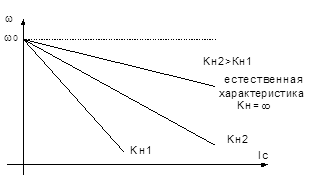
Uз выражения для DUдз и DUдр видно, что падение напряжения в замкнутой системе при одинаковых Iс в (1+КрКпКн) раз меньше, чем в разомкнутой; замкнутая система обеспечивает стабилизацию напряжения Uд, компенсируя падение напряжения в силовой цепи преобразователя. Величина DUдз является статической ошибкой по возмущению. При К = ¥ имеем идеальный источник питания неограниченной мощности и статическая характеристика регулятора будет представлять естественную характеристику ДПТ НВ (К = КрКпКн).
В общем случае статическая характеристика регулятора скорости:

Следовательно: обратная связь по напряжению не может быть использована для стабилизации w ЭП. Обычно она используется в регуляторах w в сочетании с другими видами обратных связей.
Динамические характеристики замкнутой системы авт. регулирования с отрицательной обратной связью по напряжению такие же как и в разомкнутой системе, т.е.
|
из
5.00
|
Обсуждение в статье: АСТАТИЧЕСКИЙ РЕГУЛЯТОР СКОРОСТИ |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы